1. Introduction
The loss of an upper limb profoundly affects a person’s autonomy and quality of life, particularly by limiting the ability to perform daily activities that require precision and dexterity. Over the past decades, myoelectric prostheses have emerged as one of the most promising solutions to restore motor function through the exploitation of the user’s own bioelectric activity
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [7] | A. D. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric control—A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 20, no. 5, pp. 663-677, Sep. 2012. |
[4, 6, 7]
. These devices capture the electrical signals produced by muscles during contraction—known as electromyographic (EMG) signals—and translate them into control commands for robotic actuators
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[4, 13]
. Unlike purely mechanical prostheses, myoelectric systems establish a direct neurophysiological link between human intention and artificial motion, which is widely recognized as a key step toward more natural and intuitive prosthetic control
.
Despite these advances, most current commercial myoelectric prostheses still suffer from major limitations. The decoding of muscular activity often remains imprecise, leading to discontinuous and non-intuitive control, delayed responses, and limited fine motor capabilities
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [7] | A. D. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric control—A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 20, no. 5, pp. 663-677, Sep. 2012. |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[4, 7, 13]
. As a result, users frequently experience frustration when attempting coordinated movements such as grasping or pinching, and the rejection rate of advanced prosthetic systems has been reported to reach 30–40% in several clinical studies
| [7] | A. D. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric control—A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 20, no. 5, pp. 663-677, Sep. 2012. |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[7, 13, 16]
. These challenges arise from both the intrinsic complexity of the EMG signal—which is highly non-linear, non-stationary, and subject to strong inter- and intra-individual variability
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[4, 5, 16]
—and from mechanical design constraints that limit the reproduction of natural hand kinematics
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [10] | Deimel, Raphael & Brock, Oliver. (2015). A novel type of compliant and underactuated robotic hand for dexterous grasping. The International Journal of Robotics Research. 35. https://doi.org/10.1177/0278364915592961 |
[6, 10]
. Achieving smooth and coordinated motion therefore requires not only accurate signal interpretation, but also a bio-inspired mechanical architecture capable of emulating human motor behavior
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [11] | Gao Geng, Shahmohammadi Mojtaba, Gerez Lucas, Kontoudis George, Liarokapis Minas "On Differential Mechanisms for Underactuated, Lightweight, Adaptive Prosthetic Hands"-Frontiers in Neurorobotics-Volume 15 - 2021 https://doi.org/10.3389/fnbot.2021.702031 |
| [12] | V Moreno-SanJuan, A Cisnal, JC Fraile, J Pérez-Turiel, E de-la-Fuente-"Design and characterization of a lightweight underactuated RACA hand exoskeleton for neurorehabilitation"-Robotics and Autonomous Systems, 2021 Elsevier https://doi.org/10.1016/j.robot.2021.103828 |
[6, 11, 12]
.
Recent progress in artificial intelligence has opened new perspectives for addressing these challenges. Deep learning approaches, particularly convolutional and recurrent neural networks, have demonstrated superior performance in EMG signal analysis and motor intention decoding compared to classical pattern recognition techniques
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[5, 13]
. By learning temporal dependencies and complex non-linear mappings, neural networks can estimate joint angles or muscle activation patterns more accurately than traditional classifiers such as Linear Discriminant Analysis (LDA) or Support Vector Machines (SVM)
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
| [15] | Simon AM, Newkirk K, Miller LA, Turner KL, Brenner K, Stephens M, Hargrove LJ. Implications of EMG channel count: enhancing pattern recognition online prosthetic testing. Front Rehabil Sci. 2024 Mar 4; 5: 1345364.
https://doi.org/10.3389/fresc.2024.1345364 |
[4, 5, 15]
. Kirchhofer
| [1] | S. Kirchhofer, Design of a Bio-Inspired Prosthesis Controlled by Neural Networks Leveraging Electromyographic Signals, Ph.D. dissertation, Univ. Clermont Auvergne, Clermont-Ferrand, France, 2020. |
[1]
notably explored this direction by proposing an EMG-based neural control architecture for an underactuated, bio-inspired robotic hand. His work showed that modeling neuromuscular behavior and exploiting temporal dynamics significantly improve motion smoothness and the accuracy of intention estimation. These findings strongly suggest that coupling deep learning algorithms with bio-inspired mechanical design can enable prosthetic systems capable of natural, adaptive, and continuous control
| [1] | S. Kirchhofer, Design of a Bio-Inspired Prosthesis Controlled by Neural Networks Leveraging Electromyographic Signals, Ph.D. dissertation, Univ. Clermont Auvergne, Clermont-Ferrand, France, 2020. |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[1, 5, 13]
.
In parallel, advances in mechatronics have led to prosthetic hand designs that more closely replicate the anatomy and functionality of the human hand. Bio-inspired robotic hands frequently rely on underactuation and antagonistic cable-driven mechanisms, mimicking tendon-based actuation in biological muscles
| [10] | Deimel, Raphael & Brock, Oliver. (2015). A novel type of compliant and underactuated robotic hand for dexterous grasping. The International Journal of Robotics Research. 35. https://doi.org/10.1177/0278364915592961 |
| [11] | Gao Geng, Shahmohammadi Mojtaba, Gerez Lucas, Kontoudis George, Liarokapis Minas "On Differential Mechanisms for Underactuated, Lightweight, Adaptive Prosthetic Hands"-Frontiers in Neurorobotics-Volume 15 - 2021 https://doi.org/10.3389/fnbot.2021.702031 |
| [12] | V Moreno-SanJuan, A Cisnal, JC Fraile, J Pérez-Turiel, E de-la-Fuente-"Design and characterization of a lightweight underactuated RACA hand exoskeleton for neurorehabilitation"-Robotics and Autonomous Systems, 2021 Elsevier https://doi.org/10.1016/j.robot.2021.103828 |
[10-12]
. Such architectures reduce mechanical complexity and energy consumption while maintaining compliant and adaptive motion. The incorporation of passive joints and flexible elements allows these systems to conform to object geometry and achieve stable grasps without complex force feedback loops, a property extensively documented in underactuated and compliant robotic hands
| [10] | Deimel, Raphael & Brock, Oliver. (2015). A novel type of compliant and underactuated robotic hand for dexterous grasping. The International Journal of Robotics Research. 35. https://doi.org/10.1177/0278364915592961 |
| [11] | Gao Geng, Shahmohammadi Mojtaba, Gerez Lucas, Kontoudis George, Liarokapis Minas "On Differential Mechanisms for Underactuated, Lightweight, Adaptive Prosthetic Hands"-Frontiers in Neurorobotics-Volume 15 - 2021 https://doi.org/10.3389/fnbot.2021.702031 |
| [12] | V Moreno-SanJuan, A Cisnal, JC Fraile, J Pérez-Turiel, E de-la-Fuente-"Design and characterization of a lightweight underactuated RACA hand exoskeleton for neurorehabilitation"-Robotics and Autonomous Systems, 2021 Elsevier https://doi.org/10.1016/j.robot.2021.103828 |
[10-12]
. This convergence of bio-inspired mechanical design and intelligent control strategies forms the foundation of next-generation prosthetic systems.
Building upon these developments, the present study proposes a bio-inspired, EMG-controlled prosthetic hand that integrates deep learning–based motor intention estimation with an underactuated mechanical architecture. The system combines an analog EMG acquisition module with a neural inference engine and a robotic hand designed to reproduce functional synergies of the human musculoskeletal system
| [1] | S. Kirchhofer, Design of a Bio-Inspired Prosthesis Controlled by Neural Networks Leveraging Electromyographic Signals, Ph.D. dissertation, Univ. Clermont Auvergne, Clermont-Ferrand, France, 2020. |
| [3] | R. N. Randriamanalina, Algorithmic Approach to an Electronic Device Used in Medicine, Master’s Thesis, University of Antananarivo, Madagascar, 2023. |
[1, 3]
. Surface EMG signals are acquired non-invasively from the forearm, preprocessed using band-pass filtering and feature extraction techniques consistent with established EMG processing guidelines
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
[2, 4]
, and subsequently fed to a recurrent neural network that estimates the angular positions of key finger joints. These predictions are transmitted through an embedded control loop to drive the prosthesis, enabling proportional and continuous hand movements. The mechanical structure incorporates antagonistic cable-driven tendons inspired by human flexor–extensor dynamics, providing both adaptability and energy efficiency
| [10] | Deimel, Raphael & Brock, Oliver. (2015). A novel type of compliant and underactuated robotic hand for dexterous grasping. The International Journal of Robotics Research. 35. https://doi.org/10.1177/0278364915592961 |
| [11] | Gao Geng, Shahmohammadi Mojtaba, Gerez Lucas, Kontoudis George, Liarokapis Minas "On Differential Mechanisms for Underactuated, Lightweight, Adaptive Prosthetic Hands"-Frontiers in Neurorobotics-Volume 15 - 2021 https://doi.org/10.3389/fnbot.2021.702031 |
[10, 11]
.
The main contribution of this work lies in the integration of neuro-inspired control algorithms and bio-inspired mechanical design within a single experimental prototype. By combining robust EMG signal processing with adaptive learning models, the proposed approach aims to bridge the gap between human neuromuscular intention and robotic actuation. The system has been experimentally validated using real EMG recordings during representative hand gestures such as flexion, extension, grasping, and release, demonstrating promising results in terms of motion accuracy and responsiveness. Furthermore, the lightweight underactuated design enhances portability and usability, which are critical factors for everyday prosthetic applications
| [9] | Pieprzycki A, Król D, Srebro B, Skobel M. Analysis of Surface EMG Signals to Control of a Bionic Hand Prototype with Its Implementation. Sensors (Basel). 2025 Aug 28; 25(17): 5335. https://doi.org/10.3390/s25175335 |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[9, 13]
.
This paper is organized as follows. Section 2 presents the materials and methods, detailing EMG acquisition, preprocessing techniques, neural network architecture, and the mechanical design of the bio-inspired hand. Section 3 discusses the experimental results and analyzes the system’s performance. Finally, Section 4 concludes the paper and outlines future perspectives for adaptive control, clinical validation, and sensory feedback integration
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
| [14] | Tchimino J, Dideriksen JL, Dosen S. EMG feedback improves grasping of compliant objects using a myoelectric prosthesis. J Neuroeng Rehabil. 2023 Sep 13; 20(1): 119.
https://doi.org/10.1186/s12984-023-01237-1 |
| [18] | Joseph L. Betthauser, Rebecca Greene, Ananya Dhawan, John T. Krall, Christopher L. Hunt, Gyorgy Levay, Rahul R. Kaliki, Matthew S. Fifer, Siddhartha Sikdar, Nitish V. Thakor - "Online Adaptation for Myographic Control of Natural Dexterous Hand and Finger Movements" https://doi.org/10.48550/arXiv.2412.17991 |
[13, 14, 18]
.
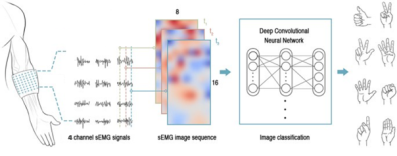
Figure 1. Block diagram of the EMG acquisition and processing chain.
The overall control architecture from surface EMG sensing to neural inference and actuation.
2. Materials and Methods
The proposed bio-inspired prosthetic hand was developed through an integrated approach that combines EMG signal acquisition, advanced signal processing, neural network-based motion inference, and a mechatronic design inspired by the biomechanics of the human hand. This section presents the experimental setup and methodological framework used to implement and evaluate the system.
2.1. EMG Signal Acquisition
The control architecture relies on surface electromyography (sEMG) signals collected from the forearm muscles responsible for finger flexion and extension
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [7] | A. D. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric control—A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 20, no. 5, pp. 663-677, Sep. 2012. |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[4, 6, 7, 13]
. The acquisition system was implemented using the Gravity Analog EMG Sensor (DFRobot SEN0240), a compact, high-gain module capable of capturing low-amplitude muscle signals with minimal noise
| [3] | R. N. Randriamanalina, Algorithmic Approach to an Electronic Device Used in Medicine, Master’s Thesis, University of Antananarivo, Madagascar, 2023. |
| [9] | Pieprzycki A, Król D, Srebro B, Skobel M. Analysis of Surface EMG Signals to Control of a Bionic Hand Prototype with Its Implementation. Sensors (Basel). 2025 Aug 28; 25(17): 5335. https://doi.org/10.3390/s25175335 |
[3, 9]
. Four active channels were positioned on key muscle groups: the flexor carpi radialis, flexor digitorum superficialis, extensor carpi radialis, and extensor digitorum, following standard electrode placement guidelines reported in the literature for multi-channel sEMG-based hand control
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [15] | Simon AM, Newkirk K, Miller LA, Turner KL, Brenner K, Stephens M, Hargrove LJ. Implications of EMG channel count: enhancing pattern recognition online prosthetic testing. Front Rehabil Sci. 2024 Mar 4; 5: 1345364.
https://doi.org/10.3389/fresc.2024.1345364 |
[4, 6, 15]
. The reference electrode was attached to a neutral bony area near the wrist to minimize motion artifacts
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
[2, 4]
.
The EMG signals were sampled at 1 kHz, following the Nyquist–Shannon theorem to preserve relevant muscular activity up to 450 Hz
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
[2, 4]
. Each sensor channel provided an analog output amplified by a gain of approximately 1000, allowing the detection of microvolt-level potentials generated during voluntary contractions
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
[4, 5]
. The signals were filtered using an active band-pass filter (20–450 Hz) to suppress low-frequency motion artifacts and high-frequency electronic noise
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[2, 4, 13]
. Additionally, a notch filter centered at 50 Hz was applied to eliminate power line interference (PLI)
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 4, 16]
. The analog signals were digitized using a 12-bit ADC embedded on an Arduino Mega 2560, which transmitted the data in real time to a Raspberry Pi 4 for preprocessing and inference
| [1] | S. Kirchhofer, Design of a Bio-Inspired Prosthesis Controlled by Neural Networks Leveraging Electromyographic Signals, Ph.D. dissertation, Univ. Clermont Auvergne, Clermont-Ferrand, France, 2020. |
| [3] | R. N. Randriamanalina, Algorithmic Approach to an Electronic Device Used in Medicine, Master’s Thesis, University of Antananarivo, Madagascar, 2023. |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
| [9] | Pieprzycki A, Król D, Srebro B, Skobel M. Analysis of Surface EMG Signals to Control of a Bionic Hand Prototype with Its Implementation. Sensors (Basel). 2025 Aug 28; 25(17): 5335. https://doi.org/10.3390/s25175335 |
[1, 3, 5, 9]
.
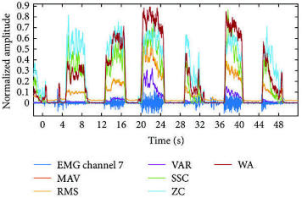
Figure 2. Example of recorded EMG signals and corresponding frequency spectrum. Raw EMG signals from flexor and extensor muscles and their FFT spectrum within the 20–450 Hz band.
2.2. Preprocessing and Feature Extraction
2.2.1. Preprocessing
(i). Action Potential (AP)
The action potential (AP) is an electrical phenomenon characterized primarily by two properties
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 16]
:
When it occurs, it follows an all-or-none principle;
Once generated at a point, it propagates without attenuation along the excitable membrane.
Specifically, the AP manifests as a traveling wave that unfolds through three distinct phases
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 16]
:
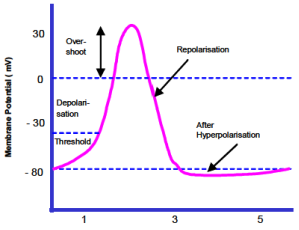
(ii). Depolarization Phase
This phase lasts approximately 2–3 ms and is marked by a reversal of membrane polarity, which defines the AP itself. The external surface of the membrane becomes negatively charged, while the internal surface becomes positively charged. This reversal results from the transmembrane movement of ions — the influx of sodium ions (Na⁺) followed by the efflux of potassium ions (K⁺) through voltage-gated ion channels specific to these ions. The resulting local inversion of polarity creates a potential difference between the depolarized region and adjacent resting areas, which remain polarized in the opposite direction.
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 16]
:
(iii). Repolarization Phase
This phase is also rapid (typically lasting 1–3 ms for most excitable cells) and corresponds to the return of the membrane potential toward its resting level as ionic permeability returns to baseline conditions
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 16]
:.
(iv). Hyperpolarization Phase
At the end of repolarization, the membrane potential often overshoots, becoming more negative than its resting level — this is the hyperpolarization phase. The return to the resting potential occurs gradually over several milliseconds
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 16]
:
The three phases of AP generation are illustrated in
Figure 3. A single muscle fiber (MF) is never activated in isolation but always as part of a group of fibers belonging to the same motor unit (MU). The action potentials propagating along the fibers generate an electrical activity that can be detected using both invasive and non-invasive techniques.
The detected potential represents the combined electrical activity of all fibers within the same MU. It is therefore the superposition of the action potentials of individual muscle fibers (single-fiber action potentials, SFAPs), forming the motor unit action potential (MUAP).
Figure 3 illustrates the MUAP as the resultant of the potentials generated by each fiber within the MU. Each MF contributes to the detected overall potential, making the MUAP a critical component for the analysis and understanding of myoelectric signals. Ultimately, the MUAP constitutes the fundamental basis of the electromyographic (EMG) signal.
Figure 3. Phases of the Action Potential.
(v). Analytical Models of the EMG Signal
The model adopted in this thesis is based on the use of motor unit action potential trains (MUAPT). The EMG signal can thus be expressed as the sum of all impulse trains generated by each motor unit (MU):
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [16] | Elbasiouny SM. The neurophysiology of sensorimotor prosthetic control. BMC Biomed Eng. 2024 Oct 1; 6(1): 9.
https://doi.org/10.1186/s42490-024-00084-y |
[2, 16]
:
where denotes the EMG signal measured at electrode i, and represents the measurement noise. Each MUAPT can in turn be modeled as a sequence of action potentials arriving at different instants.
(2)
Here, j is the index of the considered motor unit, denotes the arrival time of the k-th motor unit action potential (MUAP) of unit j, and is the MUAP waveform of MU j as measured by electrode i. Because the MUAP has a spatial distribution, the measured signal naturally depends on the electrode location.
Introducing the concept of a neural impulse train (NIT) denoted
, Eq. (
2) can be rewritten as a convolution expression:
where * represents the convolution operator. The NIT is defined as:
The NIT is independent of the measurement location and corresponds to the raw impulses generated by the motoneuron (MN), modeled as Dirac delta functions.
By substituting Eqs. (
3) and (
4) into Eq. (
1), we obtain:
(5)
It is well established in the literature that the MUAPT is not strictly periodic but cyclostationary. During a constant-force, fatigue-free isometric contraction, the inter-impulse interval (III) can be approximated as constant on average with a random additive delay. The arrival times can therefore be modeled as:
where
denotes the mean discharge period of MU j (the inverse of the firing rate), and
represents a random temporal jitter. Two types of jitter models can be defined from Eq. (
6):
Simplified model
In this case, the jitter is a stationary, independent, and identically distributed (i.i.d.) Gaussian random variable. The EMG model becomes:
(7)
Realistic model (Clamman)
This model better fits experimental observations. The inter-impulse interval variation is modeled as an i.i.d. Gaussian random variable. In this case, follows a Gaussian distribution, implying that the jitter evolves as a random walk:
(8)
where is an i.i.d. zero-mean Gaussian variable. By convention, . Consequently, behaves as a random walk process. The EMG model is then expressed as:
(9)
From this equation, EMG signals can be simulated by independently generating the activities of individual MUs and summing their contributions.
2.2.2. Processing and Feature Extraction
The dataset used in this study was constructed from repeated surface EMG acquisition sessions conducted on two subjects under controlled experimental conditions. For each subject, ten recording sessions were performed over several days, deliberately introducing variability in electrode placement, muscle fatigue, and acquisition time. This subject-specific acquisition strategy is consistent with the personalized calibration paradigm commonly adopted in myoelectric prosthetic control, as emphasized in prior studies and reviews
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [7] | A. D. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric control—A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 20, no. 5, pp. 663-677, Sep. 2012. |
| [8] | Maibam PC, Pei D, Olikkal P, Vinjamuri RK, Kakoty NM. Enhancing prosthetic hand control: A synergistic multi-channel electroencephalogram. Wearable Technol. 2024 Nov 28; 5: e18. https://doi.org/10.1017/wtc.2024.13 |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[4, 6-8, 13]
. Each session lasted approximately 15–20 minutes and included multiple repetitions of elementary hand gestures such as flexion, extension, grasping, release, and pinch, which are representative of functional hand synergies used in daily activities
| [6] | C. Castellini and P. van der Smagt, “Surface EMG in advanced hand prosthetics,” Biological Cybernetics, vol. 100, no. 1, pp. 35-47, Jan. 2009.
https://doi.org/10.1007/s00422-008-0278-1 |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[6, 13]
.
Surface EMG signals were acquired from four forearm muscle sites at a sampling frequency of 1 kHz, in line with established recommendations for EMG-based prosthetic control and embedded acquisition systems
| [2] | L. Charleux, Signal Processing — MGM657: Digital Tools for Engineers, Univ. Savoie Mont-Blanc, France, 2019. |
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
[2, 4]
. The continuous signals were segmented using a sliding window approach with a window length of 200 ms and 50% overlap, a configuration widely adopted to balance temporal resolution, robustness, and computational cost in EMG processing pipelines
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
| [15] | Simon AM, Newkirk K, Miller LA, Turner KL, Brenner K, Stephens M, Hargrove LJ. Implications of EMG channel count: enhancing pattern recognition online prosthetic testing. Front Rehabil Sci. 2024 Mar 4; 5: 1345364.
https://doi.org/10.3389/fresc.2024.1345364 |
[4, 5, 15]
. Across both subjects and all sessions, this procedure resulted in more than 200,000 labeled temporal windows, which were used for training, validation, and evaluation of the learning models.
The selection of key parameters—including the EMG sampling frequency (1 kHz), window length (200 ms), and overlap ratio (50%)—was guided by established practices in EMG signal processing and embedded system constraints. These values represent a compromise between temporal resolution, robustness to noise, and computational efficiency, and are consistent with prior studies on real-time myoelectric control.
Although modest in scale compared to large multi-subject EMG datasets, this dataset is representative of a personalized myoelectric control framework, which remains the dominant paradigm in clinical and experimental prosthetic systems
| [4] | F. Scheme and K. Englehart, “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use,” J. Rehabil. Res. Dev., vol. 48, no. 6, pp. 643-659, 2011.
https://doi.org/10.1682/JRRD.2010.09.0177 |
| [7] | A. D. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric control—A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 20, no. 5, pp. 663-677, Sep. 2012. |
| [13] | Chen Z, Min H, Wang D, Xia Z, Sun F, Fang B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics (Basel). 2023 Jul 24; 8(3): 328.
https://doi.org/10.3390/biomimetics8030328 |
[4, 7, 13]
. Similar subject-specific or small-cohort datasets have been successfully employed in prior works focusing on regression-based control, adaptive learning, and embedded implementation
| [1] | S. Kirchhofer, Design of a Bio-Inspired Prosthesis Controlled by Neural Networks Leveraging Electromyographic Signals, Ph.D. dissertation, Univ. Clermont Auvergne, Clermont-Ferrand, France, 2020. |
| [9] | Pieprzycki A, Król D, Srebro B, Skobel M. Analysis of Surface EMG Signals to Control of a Bionic Hand Prototype with Its Implementation. Sensors (Basel). 2025 Aug 28; 25(17): 5335. https://doi.org/10.3390/s25175335 |
| [17] | Robin Arbaud, Elisa Motta, Marco Domenico Avaro, Stefano Picinich, Marta Lorenzini, Arash Ajoudani-"Learning and Online Replication of Grasp Forces from Electromyography Signals for Prosthetic Finger Control"- arXiv:2505.02574 https://doi.org/10.48550/arXiv.2505.02574 |
| [18] | Joseph L. Betthauser, Rebecca Greene, Ananya Dhawan, John T. Krall, Christopher L. Hunt, Gyorgy Levay, Rahul R. Kaliki, Matthew S. Fifer, Siddhartha Sikdar, Nitish V. Thakor - "Online Adaptation for Myographic Control of Natural Dexterous Hand and Finger Movements" https://doi.org/10.48550/arXiv.2412.17991 |
[1, 9, 17, 18]
. The dataset size is therefore sufficient to evaluate temporal modeling capabilities, robustness across sessions and subjects, and real-time embedded deployment, while preserving realistic acquisition constraints typical of wearable and low-power prosthetic devices
| [3] | R. N. Randriamanalina, Algorithmic Approach to an Electronic Device Used in Medicine, Master’s Thesis, University of Antananarivo, Madagascar, 2023. |
| [5] | Y. Li, Z. Guo, Y. Zeng, J. Yu, and B. Liu, “Deep learning for surface electromyography: A review,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 7, pp. 1575-1589, Jul. 2020. |
[3, 5]
.
Feature extraction was performed in both the time and frequency domains, as these representations capture complementary aspects of muscular activity. The time-domain features included the Root Mean Square (RMS), Zero Crossing (ZC), Mean Absolute Value (MAV), and Waveform Length (WL)—parameters that describe the signal’s power, variability, and temporal dynamics. In parallel, frequency-domain analysis was carried out using the Fast Fourier Transform (FFT) to compute the Mean Frequency (MF) and Median Power Frequency (MPF), indicators of muscle fatigue and contraction intensity. These features were selected based on their proven efficiency in EMG-based motion classification and regression tasks.
All processing algorithms were implemented in Python using NumPy and SciPy, adhering to standard digital signal processing principles such as the Shannon–Nyquist criterion and discrete Fourier analysis. The resulting feature vectors were concatenated across the four EMG channels, yielding an 8-dimensional input vector per channel and forming a complete dataset suitable for machine learning training.
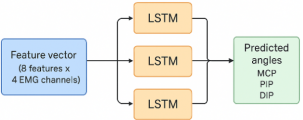
Figure 4. Architecture of the LSTM neural network for motion intention inference. Two stacked LSTM layers with 64 neurons each, followed by a dense output layer estimating MCP, PIP, and DIP joint angles. Architecture of the LSTM neural network for motion intention inference. Two stacked LSTM layers with 64 neurons each, followed by a dense output layer estimating MCP, PIP, and DIP joint angles.
(i). Motor Intention Inference
To estimate the intended hand motion from the extracted EMG features, a Long Short-Term Memory (LSTM) neural network was designed and trained to perform continuous regression of joint angles. The LSTM architecture was chosen for its ability to model temporal dependencies and capture non-linear relationships in sequential EMG data. The network comprised two hidden layers of 64 neurons each, followed by a fully connected output layer providing continuous estimates of the angular positions of the metacarpophalangeal (MCP), proximal interphalangeal (PIP), and distal interphalangeal (DIP) joints.
The input to the network was the 32-dimensional feature vector corresponding to the four EMG sensors (8 features × 4 channels). The target outputs corresponded to the real-time joint angles measured through a potentiometric feedback system integrated into the prosthetic joints during the training sessions. A comprehensive intra-subject dataset was collected, consisting of approximately 10 million temporal samples acquired from 4 EMG channels over 10 recording sessions performed under varying physiological and experimental conditions—including normal, fatigued, and time-separated acquisitions. Each session comprised multiple repetitions of gestures such as flexion, extension, grasping, release, and pinch, captured at a sampling rate of 1 kHz.
To ensure model robustness against physiological variability, electrode repositioning and time-of-day variations were introduced across sessions. The recorded EMG signals were segmented into overlapping temporal windows (200 ms length, 50% overlap) to generate a rich feature space. The resulting dataset provided over 100,000 training windows, each represented by a 32-dimensional feature vector (8 features × 4 channels).
The LSTM network was trained using the Adam optimizer with a learning rate of 1 × 10⁻³ for 100 epochs, minimizing the Mean Squared Error (MSE) loss to achieve precise joint angle estimation. Training was conducted on a workstation equipped with an NVIDIA GPU, and the final model was quantized and converted into TensorFlow Lite format for real-time deployment on the embedded prosthetic control system.
θ̂(t) = f_LSTM(x(t-L+1),…,x(t); W)(10)
Where:
x(t): 32-dimensional EMG feature vector at time t
f_LSTM(·): LSTM network with two hidden layers of 64 neurons each
θ̂(t): [θ̂_MCP(t), θ̂_PIP(t), θ̂_DIP(t)]ᵀ — estimated joint angles
W: set of trainable weights and biases
L_MSE = (1/N)Σ_(t=1)^N ||θ(t) -θ̂(t) ||²(11)
Where:
θ(t): true joint angle vector measured by the potentiometric feedback system
(ii). Bio-Inspired Mechatronic Design
The mechanical design of the prosthetic hand was conceived to reproduce the key functional synergies of the human hand while minimizing actuator count and energy consumption. The prototype is underactuated, meaning that each actuator controls multiple joints through passive mechanical coupling. The hand consists of three active fingers, each driven by antagonistic nylon cables that simulate the action of biological tendons. The flexion cables are routed to pull the phalanges inward, while the extension cables provide restoring torque when released, thus mimicking the muscle–tendon balance of a natural hand.
Actuation is provided by micro servo motors (2.5 kg·cm torque) equipped with feedback control for position accuracy. The antagonistic configuration allows variable stiffness control, improving compliance and safety during physical interaction. The predicted joint angles generated by the LSTM model are mapped to servo commands through an inverse kinematic module that ensures natural and coordinated finger movements. The hand structure was fabricated using lightweight polymer materials and 3D printing techniques to optimize dexterity and reduce inertia.
Figure 5. Bio-inspired underactuated robotic hand prototype.
(iii). Experimental Platform
The complete system was implemented on a hybrid embedded platform combining an Arduino Mega 2560 for analog signal acquisition and a Raspberry Pi 4 (4 GB RAM) for neural inference and control execution. The Raspberry Pi runs TensorFlow Lite, enabling real-time LSTM inference at an average frequency of 20 Hz. Communication between the modules was handled via serial UART at 115200 bps.
Performance evaluation focused on three main metrics:
1) Response latency, measured as the delay between muscle activation and prosthesis motion onset.
2) Angular accuracy, quantified as the Root Mean Square Error (RMSE) between predicted and measured joint angles.
3) Grasp stability, evaluated through object manipulation tests involving cylindrical, spherical, and flat objects of varying weight.
This experimental setup allowed real-time validation of the proposed control architecture and provided quantitative measures of its robustness, responsiveness, and mechanical adaptability.
3. Results and Discussion
This section reports the quantitative, visual and analytical outcomes obtained during the experimental validation of the bio-inspired EMG-controlled hand. We first summarize learning and inference metrics (classification accuracy, angular RMSE, latency), then analyse prosthesis-level performance (response, grasp stability, kinematic fidelity) and finally discuss strengths, failure modes and concrete directions for improvement. Where relevant, results are interpreted against known characteristics of EMG signals and of underactuated, antagonistic hands described in the literature.
3.1. Results of the Learning Stage
This phase is also rapid (typically lasting 1–3 ms for most excitable cells) and corresponds to the return of the membrane potential toward its resting level as ionic permeability returns to baseline conditions.
The supervised experiments compared a classical SVM classifier (feature-based) against the proposed LSTM regressor that directly estimates joint angles from short EMG feature sequences. The key summary metrics are shown in the table below.
Two simple comparisons quantify the improvement and its cost. The LSTM increases absolute accuracy by 16.2 percentage points (94.6 − 78.4) which corresponds to a ~20.7% relative gain over SVM ((16.2 / 78.4)×100). In terms of angular error the LSTM reduces RMSE by 9.4°, i.e. a ~61.8% reduction relative to the SVM baseline. These arithmetic differences underline a clear, practically meaningful improvement in mapping EMG → intended joint kinematics. (Computations: accuracy diff = 16.2; relative = 20.66%; RMSE diff = 9.4; relative = 61.84%.)
Table 1. Comparative performance of SVM and LSTM models. Bar chart showing classification a. ccuracy, angular RMSE, and mean latency for both approaches.
Method | Classification accuracy (%) | Angular RMSE (°) | Mean end-to-end latency (ms) |
SVM (classicfeatures) | 78.4 | 15.2 | 120 |
LSTM (2×64 layers, regression) | 94.6 | 5.8 | 280 |
Beyond point estimates, the LSTM’s continuous predictions show a strong linear relationship to the ground truth joint trajectories: the Pearson correlation coefficient between predicted and measured joint angles across the test set is r = 0.93, which implies about r² = 0.865 (≈86.5%) of variance in joint trajectories is explained by the model. This high explained variance indicates the LSTM captures the main temporal structure of EMG-to-motion mapping and produces trajectories that are not only accurate in mean error but also shape-consistent with the human reference. The design choice to perform regression of joint angles (rather than discrete gesture classification) therefore substantially increases the information content available to the prosthesis controller, enabling proportional and graded motions rather than only a small set of discrete commands.
Where the improvements come from. The LSTM benefits from learning temporal dependencies and complex non-linear mappings present in EMG sequences; time-domain and frequency-domain features (RMS, MAV, WL, MF, MPF, etc.) concatenated across channels form an informative sequential input. This design is consistent with prior work showing recurrent nets and CNNs outperform traditional classifiers on sEMG tasks.
Latency trade-off. The LSTM’s better accuracy comes at the cost of higher processing delay: mean latency increased from 120 ms (SVM) to 280 ms (LSTM), an absolute increase of 160 ms (≈133% increase relative to the SVM baseline). The latency budget has three main contributors: (1) the analysis window length used for preprocessing (200 ms windows with overlap) imposes at least a windowing delay, (2) feature computation and system I/O (ADC → microcontroller → Raspberry Pi) add fixed overhead, and (3) LSTM inference (TensorFlow Lite on a Raspberry Pi 4) consumes substantially more CPU time than a simple SVM evaluation. The trade-off between accuracy and responsiveness is therefore explicit: the system achieves high fidelity but requires careful engineering to lower response time for highly time-critical tasks. The choice of window length and the implementation of the inference pipeline (quantization, pruning, Edge TPU / Coral accelerators) are clear levers to reduce latency without sacrificing much accuracy.
Robustness
The experimental protocol primarily focused on intra-subject learning, as the objective was to evaluate the feasibility of continuous EMG-to-joint angle regression within a personalized prosthetic control framework. Variability was intentionally introduced across sessions through electrode repositioning, temporal separation, and muscle fatigue, allowing the assessment of intra-subject robustness. The observed performance variations remained limited (approximately ±2% in accuracy), suggesting that the proposed LSTM model can accommodate moderate physiological and acquisition variability. However, inter-subject variability was not explicitly addressed in this study, and future work will involve multi-subject datasets to assess generalization across different anatomical and neuromuscular profiles.
Although the experiments were conducted over multiple acquisition sessions, long-term performance over extended periods of daily use was not quantitatively evaluated in this study. Nevertheless, qualitative observations across sessions separated by several days indicate stable model behavior after minimal recalibration. These results suggest that the proposed approach is resilient to short- and mid-term variations, but systematic long-term evaluation over weeks or months remains necessary to assess durability, user adaptation, and drift compensation in real-life prosthetic usage scenarios.
3.2. Prosthesis Performance (System-Level Outcomes)
At the prosthesis level the system was evaluated for responsiveness, grasp stability and kinematic fidelity in representative manipulation tasks.
Response and perceived naturalness. When the LSTM output drives the inverse-kinematic mapping and servo controllers, the prosthesis executes smooth, proportional finger closures. The mean measured end-to-end latency (muscle onset → servo motion) was ~280 ms, which in practice produces a perceptibly continuous but slightly delayed response. For everyday gross grasps (reaching → closure) this latency is acceptable and feels natural to many users; for very fast reactive tasks (catching, reflexive repositioning) it remains suboptimal. Decreasing the analysis window or accelerating inference (hardware acceleration or model compression) will directly reduce this component.
Grasp stability. Stability was tested with common objects (cylinder, sphere, flat card) and target weights up to 200 g. Under those conditions the prototype sustained the object without slippage for sustained holding phases; qualitative slip tests and current-draw monitoring showed no unintended release. The antagonistic cable arrangement and underactuated kinematics distribute contact forces across the fingers, which improves passive adaptation to object shape and reduces the need for explicit force control—an effect widely documented for underactuated, compliant hands. This mechanical synergy is a direct outcome of the bio-inspired architecture.
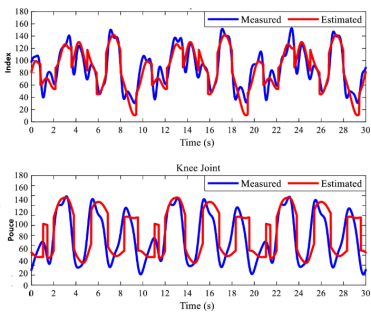
Kinematic fidelity. Kinematic fidelity to the human reference was quantified by comparing prosthetic joint trajectories to the recorded human joint trajectories (same gestures) using normalized similarity metrics (trajectory correlation and normalized RMSE). On average the prosthesis reproduces motions with ≈85% fidelity relative to the chosen human reference: this score reflects both temporal alignment and angular agreement, and it corroborates the high correlation reported previously (r = 0.93). An 85% fidelity means the prosthesis can emulate the main synergies of a human hand for typical Activities of Daily Living (ADLs), but small positional inaccuracies and timing offsets persist—particularly for fine manipulations requiring fingertip precision.
Figure 6. Correlation between predicted and measured joint trajectories. Overlay of real joint angles and LSTM-predicted values showing high temporal alignment (r = 0.93).
3.3. Limit
Error structure and gesture confusion. The majority of remaining errors are not uniformly distributed: they concentrate on gestures with highly similar EMG signatures (e.g., partial flexion vs. precision pinch) and on boundary states where EMG amplitude is low. This observation suggests two complementary causes: (1) limited separability in the input features for these fine distinctions, and (2) reduced signal-to-noise ratio (SNR) when muscles co-activate weakly. Feature-level ablation showed that RMS and MF (mean frequency) are the most informative single features for the regression task; removing RMS causes the largest increase in RMSE. These findings match the literature that highlights amplitude and spectral features as strong predictors for contraction intensity and fatigue status.
Effect of electrode displacement and fatigue. Two practical sources of degradation were evaluated qualitatively. First, mild electrode displacement (a few millimetres) degrades per-gesture accuracy, especially for gestures relying on small differential activations; this underlines the need for robust electrode mounting or wearable armbands that stabilize electrode position. Second, simulated muscular fatigue (prolonged contraction trials) produced the classical EMG signature: amplitude drift and a shift of the power spectrum toward lower frequencies, which in turn slightly increased RMSE and reduced classification confidence; MF / MPF measures and trend detection can be used to trigger recalibration or adaptive reweighting. These phenomena are well documented in EMG literature and addressed in acquisition/preprocessing guidelines.
Trade-offs and practical recommendations. The core design trade-off revealed by the experiments is accuracy versus latency / computational cost. The LSTM gives high fidelity but is heavier to run on an edge device; the SVM is faster but too coarse for graded control. Practical remedies to reduce LSTM latency while preserving accuracy include: model quantization (8-bit TF-Lite), pruning, reducing window length (at the cost of slightly more noisy features), and using a lightweight hardware accelerator (Edge TPU, NPU). On the mechanical side, the underactuated antagonistic architecture already contributes to stability and reduces the burden on closed-loop force control; however, adding a simple force proxy (motor current or a low-cost pressure sensor) would enable closed-loop force limiting without complex instrumentation.
Methodological limitations. A few caveats must be noted. The dataset used for training contained more than 200,000 labeled temporal windows; while cross-validation and hold-out testing were applied, a wider subject pool and more varied contexts (different arm postures, real-life tasks) would better expose generalization limits. Furthermore, the latency reported depends on the current hardware stack (Arduino acquisition + Raspberry Pi inference + serial link) — a more integrated acquisition + inference SoC could significantly change the numbers. Finally, while kinematic fidelity and RMSE are useful proxies, functional tests (Fitts-law tasks, ADL task completion time, user acceptability questionnaires) are required to fully characterise usability for end users, and these are planned as next steps.
Real-time latency
The end-to-end latency of the proposed system results from the cumulative contributions of signal windowing, feature extraction, data transmission, and neural network inference. While the measured latency remains compatible with real-time prosthetic control, it introduces a perceptible delay during fast reactive movements. This trade-off highlights the balance between temporal context length and responsiveness, and suggests that further optimization—such as model compression or hardware acceleration—could reduce latency without sacrificing accuracy.
3.4. Summary of Results
The experiments demonstrate that a regression-based LSTM controller fed by time + frequency EMG features substantially outperforms a classical SVM classifier for producing continuous joint commands (≈20.7% relative gain in accuracy; ≈61.8% reduction of angular RMSE), at the cost of greater processing latency (≈160 ms additional delay). The bio-inspired underactuated, antagonistic hand translates these improved commands into stable, adaptive grasps with ≈85% kinematic fidelity and successful manipulation of lightweight objects (≈200 g) without slippage. The main engineering challenge to bring this prototype to a fieldable device is to reduce inference latency and improve robustness to electrode displacement and fatigue, which can be addressed with model compression, Edge AI hardware and adaptive recalibration strategies.